Зависимый позиционный допуск расположения отверстий. Зависимый и независимый допуск формы или расположения
Стандартами установлены два вида допусков расположения: зависимые и независимые.
Зависимый допуск имеет переменное значение и зависит от действительных размеров базового и рассматриваемого элементов. Зависимый допуск более технологичный.
Зависимыми могут быть следующие допуски расположения поверхностей: позиционные допуски, допуски соосности, симметричности, перпендикулярности, пересечение осей.
Зависимыми могут быть допуски формы: допуск прямолинейности оси и допуск плоскостности для плоскости симметрии.
Зависимые допуски должны быть обозначены символом или оговорены текстом в технических требованиях.
Независимый допуск имеет постоянное числовое значение для всех деталей и не зависит от их действительных размеров.
Допуск параллельности и наклона может быть только независимый.
При отсутствии на чертеже специальных обозначений допуски понимаются как независимые. Для независимых допусков может использоваться символ хотя его указание необязательно.
Независимые допуски используются для ответственных соединений, когда их величина определяется функциональным назначением детали.
Независимые допуски также используются в мелкосерийном и единичном производстве, а их контроль производится универсальными измерительными средствами (см. таблицу 3.13).
Зависимые допуски устанавливаются для деталей, сопрягаемых одновременно по двум или более поверхностям, для которых взаимозаменяемость сводится к обеспечению собираемости по всем сопрягаемым поверхностям (соединение фланцев с помощью болтов).
Используются зависимые допуски в соединениях с гарантированным зазором в крупносерийном и массовом производстве, контроль их производится калибрами расположения. На чертеже указывается минимальное значение допуска (Тр min),которое соответствует проходному пределу (наименьший предельный размер отверстия или наибольший предельный размер вала). Фактическая величина зависимого допуска расположения определяется действительными размерами соединяемых деталей, т. е. в разных сборках она может быть разная. При соединениях по скользящей посадке Tp min = 0. Полное значение зависимого допуска определяется прибавлением к Тр min дополнительной величины Т доп, зависящей от действительных размеров данной детали (ГОСТ Р 50056):
Tp зав = Тр min + Т доп.
Примеры расчета величины расширения допуска для типовых случаев даны в таблице 3.14. В этой таблице также даны формулы для пересчета допусков расположения на позиционные допуски при проектировании калибров расположения (ГОСТ 16085).
Расположение осей отверстий под крепежные детали (болты, винты, шпильки, заклепки) может быть задано двумя способами:
Координатным, когда заданы предельные отклонения ± δL координирующих размеров;
Позиционным, когда заданы позиционные допуски в диаметральном выражении – Тр.
Таблица 3.13 – Условия выбора зависимого допуска расположения
|
Условия работы соединения |
Вид допуска расположения |
|
Условия выбора: Крупносерийное, массовое производство Требуется обеспечить только собираемость при условии полной взаимозаменяемости Контроль калибрами расположения Вид соединений: Неответственные соединения Сквозные отверстия под крепеж |
Зависимый |
|
Условия выбора: Единичное и мелкосерийное производство Требуется обеспечить правильное функционирование соединения (центрирование, герметичность, балансировка и другие требования) Контроль универсальными средствами Вид соединений: Ответственные соединения с натягом или по переходным посадкам Резьбовые отверстия под шпильки или отверстия под штифты Посадочные места под подшипники, отверстия под валы зубчатых передач |
Независимый |
Пересчет допусков из одного способа в другой производится по формулам таблицы 3.15 для системы прямоугольных и полярных координат.
Координатный способ используется в единичном, мелкосерийном производстве, для неуказанных допусков расположения, а также в случаях, если требуется пригонка деталей, если заданы разные величины допусков по координатным направлениям, если число элементов в одной группе менее трех.
Позиционный способ более технологичный и используется в крупносерийном и массовом производстве. Позиционные допуски наиболее часто используются для задания расположения осей отверстий под крепежные детали. При этом координирующие размеры указываются только номинальными значениями в квадратных рамках , так как на эти размеры не распространяется понятие «общий допуск».
Числовые значения позиционных допусков не имеют степеней точности и определяются из базового ряда числовых значений по ГОСТ 24643. Базовый ряд состоит из следующих чисел: 0,1; 0,12; 0,16; 0,2; 0,25; 0,4; 0,5; 0,6; 0,8 мкм, эти значения могут быть увеличены в 10 ÷ 10 5 раз.
Числовое значение позиционного допуска зависит от типа соединения А (болтами, два сквозных отверстия во фланцах) или В (соединение шпильками, т. е. зазор в одной детали). По известному диаметру крепежной детали определяется по таблице 3.16 ряд отверстий, их диаметр (D ) и минимальный зазор (S min).
Таблица 3.14 – Перерасчет допусков расположения поверхностей на позиционные допуски
|
Допуск расположения поверхностей |
Формулы для определения позиционного допуска |
Максимальное расширение допуска Тдоп |
|
|
Допуск соосности (симметричности) относительно оси базовой поверхности |
|
Для базы Т Р = 0 Для конт ролируемой поверхност и Т Р = Т С |
Т доп = Td 1 Т доп = Td 2 |
|
Допуск соосности (симметричности) относительно общей оси |
|
Т Р1 = Т С1 Т Р2 = Т С2 |
Т доп = Td 1 + Td 2 |
|
Допуск соосности (симметричности) двух поверхностей База не указана |
|
Т Р1 = Т Р2 = |
Т доп = TD 1 + TD 2 |
|
Допуск перпендикулярности оси поверхности относительно плоскости |
|
Т Р = Т |
Т доп = TD |




На чертеже детали указывают величину позиционного допуска (см. таблицу 3.7), решив вопрос о его зависимости. Для сквозных отверстий допуск назначается зависимый, а для резьбовых – независимый, поэтому он расширяется.
Для соединения типа (А) Т поз = S p , для соединений типа (В ) для сквозных отверстий Т поз = 0,4 S p , а для резьбовых Т поз =(0,5÷0,6) S p (рисунок 3.4).

1, 2 – соединяемые детали
Рисунок 3.4 – Виды соединения деталей при помощи крепежных изделий:
а – тип А, болтами; б – тип В, шпильками, штифтами
Расчетный зазор S р, необходимый для компенсации погрешности расположения отверстий, определяется по формуле:
S p = S min ,
где коэффициент К использования зазора для компенсации отклонения расположения осей отверстий и болтов. Он может принимать следующие значения:
К = 1 – в соединениях без регулировки в нормальных условиях сборки;
К = 0,8 – в соединениях с регулировкой, а также в соединениях без регулировки, но с утопленными и потайными головками винтов;
К = 0,6 – в соединениях с регулировкой расположения деталей при сборке;
К = 0 – для базового элемента, выполненного по скользящей посадке (H /h ), когда номинальный позиционный допуск этого элемента равен нулю.
Если позиционный допуск оговаривается на определенном расстоянииотповерхности детали, то он задается как выступающий допуск и обозначается символом (Р ). Например: центр сверла, торец шпильки, ввернутой в корпус.
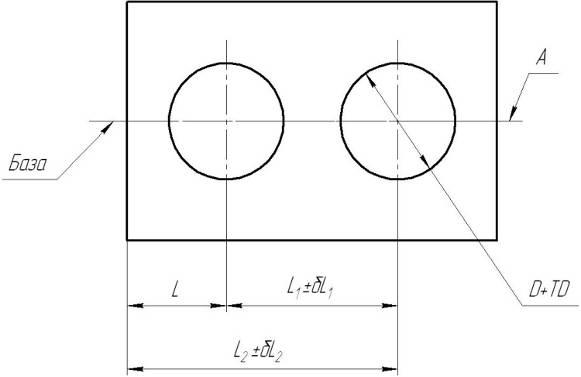
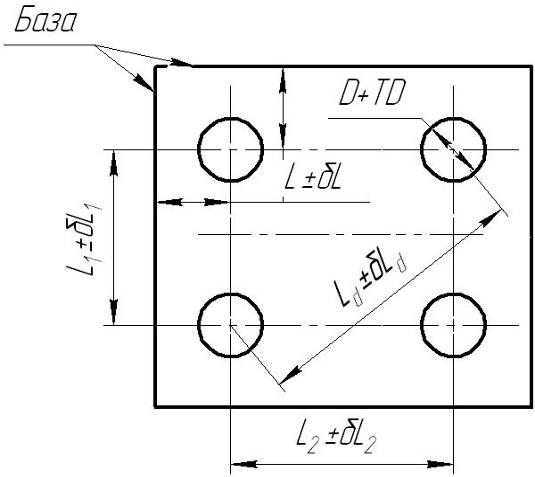
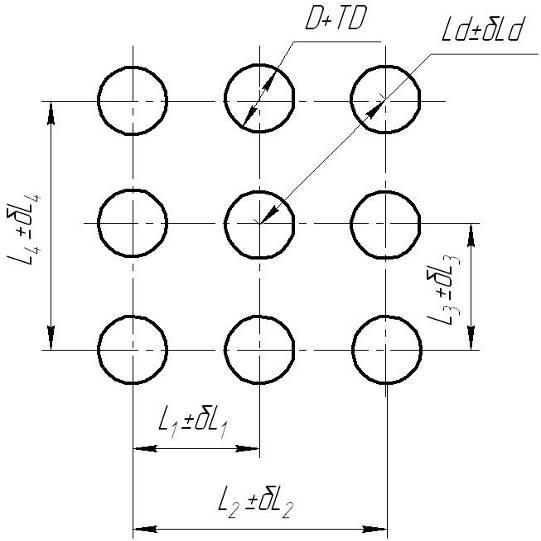
Таблица 3.15 – Пересчет предельных отклонений размеров, координирующих оси отверстий на позиционные допуски по ГОСТ 14140
|
Вид расположения |
Формулы для определения позиционного допуска (в диаметральном выражении) |
|
|
Система прямоугольных координат |
||
|
Одно отверстие задано от сборочной базы
|
Т р = 2δL δL = ±0,5 Т р Т доп = TD |
|
|
Два отверстия координированы относительно друг друга (сборочная база отсутствует)
|
Т р = δL δL = ± Т р Т доп = TD |
|
|
Три и более отверстий, расположенных в один ряд (сборочная база отсутствует)
|
Т р = 1,4δL δL =± 0,7Т р Т доп = TD δL y = ± 0,35Т р (δL y – от клонение от носит ельно базовой оси) δL лес = δL ∑∕2 (лесенкой) δL цеп = δL ∑ ∕(n–1) (цепочкой) δL ∑ – наибольшее расст ояние между осями смежных от верст ий |
|
|
Два и более отверстий расположены в один ряд (заданы от сборочной базы)
|
Т доп = TD Т р = 2,8δL 1 = 2,8 δL 2 δL 1 = δL 2 = ± 0,35Т р (от клонение осей от общей плоскост и – А или сборочной базы) |
|
|
Отверстия расположены в два ряда (сборочная база отсутствует)
Отверстия координированы относительно двух сборочных баз |
Т р1,4δL 1 1,4 δL 2 δL 1 = δL 2 = ± 0,7 Т р Т р = δL d δL d = ± Т р (размер задан до диагонали) Т доп = TD δL 1 = δL 2 = δL Т р 2,8 δL δL = ± 0,35Т р |
|
|
Отверстия расположены в несколько рядов (сборочная база отсутствует)
|
δL 1 = δL 2 = … δL Т р 2,8 δL δL = ± 0,35Т р Т р = δL d δL d = ± Т р (размер задан до диагонали) Т доп = TD |
|
|
Система полярных координат |
||
|
Два отверстия, координированы относительно оси центрального элемента
|
Т р = 2,8 δR δR = ± 0,35Т р δα
= ± (угловые минут ы) Т доп = TD |
|
|
Три и более отверстия расположены по окружности (сборочная база отсутствует)
Три и более отверстия расположены по окружности, центральный элемент является сборочной базой |
Т доп = TD Т р = 1,4 δα δα = ± 0,7Т р (угловые минут ы) δα 1 = δα 2 = Т доп = TD + Т D баз |
|



 3400
3400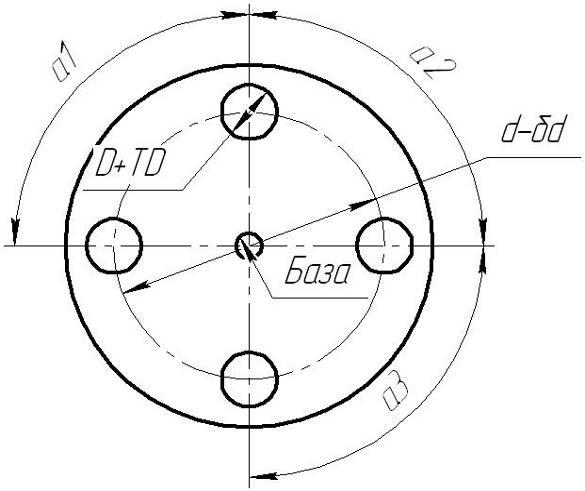
Таблица 3.16 – Диаметры сквозных отверстий под крепежные детали и соответствующие им гарантированные зазоры по ГОСТ 11284, мм
|
Диаметр крепежной детали d | ||||||
|
Примечания: 1 Предпочтительным является 1-й ряд, который используется для соединений типов А и В (отверстия могут быть получены любым методом). 2 Для соединений типов А и В рекомендуется использовать 2-й ряд при получении отверстий по разметке, пробивке штампом повышенной точности, в литье по выплавляемым моделям или под давлением. 3 Соединения типа А могут быть выполнены по 3-му ряду при расположении с 6-го по 10-и вид, а также соединения типа В при расположении с 1-го по 5-й вид (любой метод обработки, кроме заклепочных соединений). |
||||||
Зависимым называется переменный допуск расположения (на чертеже указывают минимальное значение), который допускается превышать на величину, соответствующую отклонению действительного размера поверхности детали от проходного предела (наибольшего предельного размера вала или наименьшего предельного размера отверстия).
Зависимые допуски расположения назначают главным образом в тех случаях, когда необходимо обеспечить собираемость деталей, сопрягающихся одновременно по нескольким поверхностям с заданными зазорами или натягами.
Зависимые допуски часто контролируют комплексными калибрами, являющимися прототипом сопрягаемой детали.
Иногда зависимые допуски назначают и на отклонения формы.
Независимым называется допуск расположения или формы, величина которого постоянна для всех деталей, изготовленных по данному чертежу, и не зависит от действительных отклонений размеров рассматриваемых поверхностей.
Чистовые значения отклонений формы и расположения (ст сэв 636 – 77)
Стандартом СЭВ установлено 16 степеней точности формы и расположения поверхностей. 16 – самая грубая. Числовые значения допусков от одной степени точности к другой возрастают в 1,6 раза.
В справочных таблицах степени точности указаны арабскими цифрами (по старым ГОСТам – римскими).
На чертежах степень точности никогда не указывается, а записывается конкретное числовое значение допуска формы или расположения.
В зависимости от соотношения между попуском размера и допусками формы или расположения устанавливают следующие уровни относительной геометрической точности.
А – нормальная относительная геометрическая точность (допуск формы или расположения в среднем составляет 60% от допуска размера);
В – повышенная относительная геометрическая точность (40%);
С – высокая относительная геометрическая точность (25%).
Для цилиндричности, круглости и профиля продольного сечения относительная геометрическая точность для А, В и С составляет соответственно 30, 20 и 12% от допуска размера. Это вызвано тем, что допуск указываемых отклонений формы ограничивает отклонение радиуса, а допуск размера относится к диаметру поверхности.
Обозначение на чертежах допусков формы и расположения поверхностей.
Вид допуска формы и расположения должен обозначаться на чертеже знаком (СТ СЭВ 368 – 76).
|
Группа допуска |
Вид допуска | |
|
Допуски формы |
Допуск прямолинейности Допуск плоскостности Допуск круглости Допуск цилиндричности Допуск профиля продольного сечения | |
|
Допуски расположения |
Допуск параллельности Допуск перпендикулярности Допуск наклона Допуск соосности Допуск симметричности Позиционный допуск Допуск пересечения осей | |
|
Суммарные допуски формы и расположения |
Допуск радиального биения Допуск торцевого биения Допуск биения в заданном направлении Допуск полного радиального биения Допуск полного торцевого биения Допуск формы заданного профиля Допуск формы заданной поверхности |
Знак и числовое значение допуска вписывают в рамку: на первом месте указывают знак, на втором месте числовое значение допуска и на третьем месте буквой указывают базу, относительно которой определяют допуск. Допускается базу указывать не буквой, а линией, соединяющей рамку с зачернённым треугольником, нарисованным на базовой поверхности. Для погрешности формы база не указывается.
Если обозначение записано дробно, то в знаменателе указывается базовая длина на которой конструируется отклонение.
Если базовая длина не указывается, то отклонение контролируют по всей длине поверхности.
| Наименование параметра | Значение |
| Тема статьи: | Зависимый допуск |
| Рубрика (тематическая категория) | Стандартизация |
Уровни относительной геометрической точности допусков формы и расположения поверхностей
Это соотношением между допуском формы и расположения и допуском на размер элемента:
А – нормальная относительная геометрическая точность (допуски формы или расположения составляют примерно 60% допуска размера);
В – повышенная относительная геометрическая точность (допуски формы или расположения составляют примерно 40% допуска размера);
С – высокая относительная геометрическая точность (допуски формы или расположения составляют примерно 25% допуска размера).
Допуски формы цилиндрических поверхностей (для отклонений от цилиндричности, круглости и профиля продольного сечения), соответствующие уровням А, В и С, составляют примерно 30, 20 и 12 % допуска размера, так как допуск формы ограничивает отклонение радиуса, а допуск размера – отклонение диаметра поверхности. В случае если допуски формы и расположения ограничивают полем допуска размера, то они не указываются.
У несопрягаемых и легкодеформируемых поверхностей элементов допуск формы должна быть больше допуска на размер.
14 Неуказанные допуски формы и расположения
устанавливают исходя из квалитета или класса точности, которым соответствует допуск размера. Допуск может оговариваться и в технических требованиях.
В случае если неуказанные допуски формы не назначены, то допускаются любые отклонения формы в пределах поля допуска размера рассматриваемого элемента. Кроме случая, когда указаны допуски параллельности, перпендикулярности, наклона или торцового биения. Тогда неуказанный допуск плоскостности и прямолинейности равен допуску этих отклонений.
С неуказанными допусками расположения дело обстоит сложнее. Здесь для случаев отклонения от параллельности, перпендикулярности, соосности, симметричности, расположения предъявляются отдельные требования.
- ϶ᴛᴏ переменный допуск, при котором годность элемента оценивают исходя из получившихся у каждой конкретной детали действительных размеров влияющих элементов. Зависимые допуски нужны для увеличения выхода годных деталей за счёт повышения собираемости деталей, действительные размеры которых смещаются в сторону минимума металла. На чертеже указывают минимальные значения допустимых отклонений, которые обеспечивают собираемость соединения.
Зависимые допуски расположения преимущественно назначают на межосевые расстояния крепежных отверстий, соосность участков ступенчатых отверстий, на симметричность расположения шпоночных пазов и т. п. Эти допуски контролируют комплексными калибрами расположения, которые представляют из себяпрототипы сопрягаемых деталей.
В условиях единичного и мелкосерийного производства нецелесообразно нормировать зависимые допуски.
16 Выступающие поля допусков расположения
Это поле допуска или его часть, ограничивающее отклонение расположения рассматриваемого элемента за пределами протяженности этого элемента (нормируемый участок выступает за пределы длины элемента).
В случае если крайне важно задать выступающее поле допуска расположения, то после числового значения допуска указывают символ Р в круге. Контур выступающей части нормируемого элемента ограничивают тонкой сплошной линией, а длину и расположение выступающего поля-допуска - размерами (рис. 4).

Рисунок 4 - Пример обозначения выступающего поля допуска
1 Влияние микрогеометрии поверхности на качество продукции, оптимальная шероховатость.
Шероховатость и волнистость поверхностей деталей влияют на показатели жидкостного трения; газодинамического сопротивления и эрозионного износа; трения и износа при скольжении; трения, износа и вибраций при качении; статической и динамической непроницаемости и т. д.
В подвижных посадках шероховатость и волнистость нарушают смазку и снижают несущую способность масляного слоя.
Из-за шероховатости поверхности контакт поверхностей деталей происходит по вершинам неровностей. Отношение фактической площади контакта к номинальной (рис. 3) при точении, развертывании и шлифовании составляет 0,25-0,3, при суперфинишировании и доводке - 0,4 и более.
При таком контакта происходит вначале упругая, а потом пластическая деформация неровностей, вершин некоторых неровностей обламываются. Происходит интенсивный износ деталей и увеличение зазора между сопряженными поверхностями.
Неровности снижают усталостную прочность деталей. Так, при уменьшении шероховатости впадины нарезанной или шлифованной резьбы болтов с Ra = 1,25 до Ra = 0,125 допустимая предельная амплитуда цикла напряжений увеличивается на 20-50%.
Выглаживание поверхностей на 25-40% повышает усталостную прочность и на 15-30% износостойкость деталей из легированных сталей.
Коррозия металла быстрее возникает и распространяется на грубообработанных поверхностях, что в несколько раз снижает прочность. Шероховатость поверхности управляемый фактор, ее можно получить с заданной характеристикой у всех деталей партии.
В неподвижных посадках волнистость и шероховатость ослабляют прочность соединения.
В работе машины различают обкатку, период нормальной работы и катастрофический износ. Получающаяся после приработки шероховатость, обеспечивающая минимальный износ и сохраняющаяся в процессе длительной эксплуатации машин, принято называть оптимальной . Оптимальная шероховатость увеличивает долговечность машины и сохраняет ее точность.
Оптимальная шероховатость характеризуется высотой, шагом и формой неровностей. Ее параметры зависят от качества смазки и других условий работы трущихся деталей, их конструкций и материала. Оптимальная шероховатость не обязательно низкая.
2 Параметры и характеристики шероховатости поверхностей; базовая длина, высотные и шаговые параметры.
Шероховатость поверхности - совокупность неровностей с относительно малыми шагами, выделенная с помощью базовой длины. Шероховатость поверхности можно рассматривать для любых поверхностей, кроме ворсистых и пористых. Шероховатость относится к микрогеометрии поверхности.
Числовые значения шероховатости поверхности определяют от единой базы, за которую принята средняя линия профиля. Базовая линия, имеет форму номинального профиля и проведенна так, что в пределах базовой длины среднее квадратическое отклонение профиля до этой линии минимально. Этот метод контроля шероховатости называют системой средней линии.
Для выделения неровностей разной величины, характеризующих шероховатость поверхности, введено понятие длины базовой линии l : 0,01; 0,03; 0,08; 0,25; 0,80; 2,5; 8; 25 мм.
Для количественной оценки шероховатости установлено шесть параметров: три высотных, два шаговых и относительная опорная длина профиля:
Средним арифметическим абсолютных значений отклонением профиля Ra в пределах базовой длины l :
Ra = |y(x)|dx ; (1)
Ra = |y i |, (2)
где l - базовая длина;
n - число выбранных точек профиля на базовой длине.
Отклонение профиля у - это расстояние между любой точкой профиля и средней линией.
Параметр Ra предпочтительный, нормируется значениями от 0,008 до 100 мкм из ряда R 10;
Высотой неровностей профиля по десяти точкам Rz , т. е. суммой средних абсолютных значений высот пяти наибольших выступов профиля и глубин пяти наибольших впадин профиля в пределах базовой длины l . Установлены значения Rz от 0,025 до 1600 мкм;
Наибольшей высотой неровностей профиля Rmax , т. е. расстоянием между линией выступов профиля и линией впадин профиля в пределах базовой длины l ;
![]()
Рисунок 1 - Схема к пониманию среднего шага неровностей Sm
Средним значением шага неровностей Sm профиля в пределах базовой длины l . (от 0,002 до 12,5 мкм);

Рисунок 2 - Схема к пониманию среднего шага местных выступов S
Средним значением шага местных выступов профиля S в пределах базовой длины l . Числовые значения параметров шероховатости стандартизованы;

Рисунок 3 - Схема к пониманию относительной опорной длины профиля tp
Относительной опорной длиной профиля tp (p - значение уровня сечения профиля, рис. 3.2).
Зависимый допуск - понятие и виды. Классификация и особенности категории "Зависимый допуск" 2014, 2015.
Стандартами установлены два вида допусков расположения: зависимые и независимые.
Зависимый допуск имеет переменное значение и зависит от действительных размеров базового и рассматриваемого элементов. Зависимый допуск более технологичный.
Зависимыми могут быть следующие допуски расположения поверхностей: позиционные допуски, допуски соосности, симметричности, перпендикулярности, пересечение осей.
Зависимыми могут быть допуски формы: допуск прямолинейности оси и допуск плоскостности для плоскости симметрии.
Зависимые допуски должны быть обозначены символом или оговорены текстом в технических требованиях.
Независимый допуск имеет постоянное числовое значение для всех деталей и не зависит от их действительных размеров.
Допуск параллельности и наклона может быть только независимый.
При отсутствии на чертеже специальных обозначений допуски понимаются как независимые. Для независимых допусков может использоваться символ хотя его указание необязательно.
Независимые допуски используются для ответственных соединений, когда их величина определяется функциональным назначением детали.
Независимые допуски также используются в мелкосерийном и единичном производстве, а их контроль производится универсальными измерительными средствами (см. таблицу 3.13).
Зависимые допуски устанавливаются для деталей, сопрягаемых одновременно по двум или более поверхностям, для которых взаимозаменяемость сводится к обеспечению собираемости по всем сопрягаемым поверхностям (соединение фланцев с помощью болтов).
Используются зависимые допуски в соединениях с гарантированным зазором в крупносерийном и массовом производстве, контроль их производится калибрами расположения. На чертеже указывается минимальное значение допуска (Тр min),которое соответствует проходному пределу (наименьший предельный размер отверстия или наибольший предельный размер вала). Фактическая величина зависимого допуска расположения определяется действительными размерами соединяемых деталей, т. е. в разных сборках она может быть разная. При соединениях по скользящей посадке Tp min = 0. Полное значение зависимого допуска определяется прибавлением к Тр min дополнительной величины Т доп, зависящей от действительных размеров данной детали (ГОСТ Р 50056):
Tp зав = Тр min + Т доп.
Примеры расчета величины расширения допуска для типовых случаев даны в таблице 3.14. В этой таблице также даны формулы для пересчета допусков расположения на позиционные допуски при проектировании калибров расположения (ГОСТ 16085).
Расположение осей отверстий под крепежные детали (болты, винты, шпильки, заклепки) может быть задано двумя способами:
Координатным, когда заданы предельные отклонения ± δL координирующих размеров;
Позиционным, когда заданы позиционные допуски в диаметральном выражении – Тр.
Таблица 3.13 – Условия выбора зависимого допуска расположения
|
Условия работы соединения |
Вид допуска расположения |
|
Условия выбора: Крупносерийное, массовое производство Требуется обеспечить только собираемость при условии полной взаимозаменяемости Контроль калибрами расположения Вид соединений: Неответственные соединения Сквозные отверстия под крепеж |
Зависимый |
|
Условия выбора: Единичное и мелкосерийное производство Требуется обеспечить правильное функционирование соединения (центрирование, герметичность, балансировка и другие требования) Контроль универсальными средствами Вид соединений: Ответственные соединения с натягом или по переходным посадкам Резьбовые отверстия под шпильки или отверстия под штифты Посадочные места под подшипники, отверстия под валы зубчатых передач |
Независимый |
Пересчет допусков из одного способа в другой производится по формулам таблицы 3.15 для системы прямоугольных и полярных координат.
Координатный способ используется в единичном, мелкосерийном производстве, для неуказанных допусков расположения, а также в случаях, если требуется пригонка деталей, если заданы разные величины допусков по координатным направлениям, если число элементов в одной группе менее трех.
Позиционный способ более технологичный и используется в крупносерийном и массовом производстве. Позиционные допуски наиболее часто используются для задания расположения осей отверстий под крепежные детали. При этом координирующие размеры указываются только номинальными значениями в квадратных рамках , так как на эти размеры не распространяется понятие «общий допуск».
Числовые значения позиционных допусков не имеют степеней точности и определяются из базового ряда числовых значений по ГОСТ 24643. Базовый ряд состоит из следующих чисел: 0,1; 0,12; 0,16; 0,2; 0,25; 0,4; 0,5; 0,6; 0,8 мкм, эти значения могут быть увеличены в 10 ÷ 10 5 раз.
Числовое значение позиционного допуска зависит от типа соединения А (болтами, два сквозных отверстия во фланцах) или В (соединение шпильками, т. е. зазор в одной детали). По известному диаметру крепежной детали определяется по таблице 3.16 ряд отверстий, их диаметр (D ) и минимальный зазор (S min).
Таблица 3.14 – Перерасчет допусков расположения поверхностей на позиционные допуски
|
Допуск расположения поверхностей |
Формулы для определения позиционного допуска |
Максимальное расширение допуска Тдоп |
|
|
Допуск соосности (симметричности) относительно оси базовой поверхности |
|
Для базы Т Р = 0 Для конт ролируемой поверхност и Т Р = Т С |
Т доп = Td 1 Т доп = Td 2 |
|
Допуск соосности (симметричности) относительно общей оси |
|
Т Р1 = Т С1 Т Р2 = Т С2 |
Т доп = Td 1 + Td 2 |
|
Допуск соосности (симметричности) двух поверхностей База не указана |
|
Т Р1 = Т Р2 = |
Т доп = TD 1 + TD 2 |
|
Допуск перпендикулярности оси поверхности относительно плоскости |
|
Т Р = Т |
Т доп = TD |
На чертеже детали указывают величину позиционного допуска (см. таблицу 3.7), решив вопрос о его зависимости. Для сквозных отверстий допуск назначается зависимый, а для резьбовых – независимый, поэтому он расширяется.
Для соединения типа (А) Т поз = S p , для соединений типа (В ) для сквозных отверстий Т поз = 0,4 S p , а для резьбовых Т поз =(0,5÷0,6) S p (рисунок 3.4).
1, 2 – соединяемые детали
Рисунок 3.4 – Виды соединения деталей при помощи крепежных изделий:
а – тип А, болтами; б – тип В, шпильками, штифтами
Расчетный зазор S р, необходимый для компенсации погрешности расположения отверстий, определяется по формуле:
S p = S min ,
где коэффициент К использования зазора для компенсации отклонения расположения осей отверстий и болтов. Он может принимать следующие значения:
К = 1 – в соединениях без регулировки в нормальных условиях сборки;
К = 0,8 – в соединениях с регулировкой, а также в соединениях без регулировки, но с утопленными и потайными головками винтов;
К = 0,6 – в соединениях с регулировкой расположения деталей при сборке;
К = 0 – для базового элемента, выполненного по скользящей посадке (H /h ), когда номинальный позиционный допуск этого элемента равен нулю.
Если позиционный допуск оговаривается на определенном расстоянииотповерхности детали, то он задается как выступающий допуск и обозначается символом (Р ). Например: центр сверла, торец шпильки, ввернутой в корпус.
Таблица 3.15 – Пересчет предельных отклонений размеров, координирующих оси отверстий на позиционные допуски по ГОСТ 14140
|
Вид расположения |
Формулы для определения позиционного допуска (в диаметральном выражении) |
|
|
Система прямоугольных координат |
||
|
Одно отверстие задано от сборочной базы
|
Т р = 2δL δL = ±0,5 Т р Т доп = TD |
|
|
Два отверстия координированы относительно друг друга (сборочная база отсутствует)
|
Т р = δL δL = ± Т р Т доп = TD |
|
|
Три и более отверстий, расположенных в один ряд (сборочная база отсутствует)
|
Т р = 1,4δL δL =± 0,7Т р Т доп = TD δL y = ± 0,35Т р (δL y – от клонение от носит ельно базовой оси) δL лес = δL ∑∕2 (лесенкой) δL цеп = δL ∑ ∕(n–1) (цепочкой) δL ∑ – наибольшее расст ояние между осями смежных от верст ий |
|
|
Два и более отверстий расположены в один ряд (заданы от сборочной базы)
|
Т доп = TD Т р = 2,8δL 1 = 2,8 δL 2 δL 1 = δL 2 = ± 0,35Т р (от клонение осей от общей плоскост и – А или сборочной базы) |
|
|
Отверстия расположены в два ряда (сборочная база отсутствует)
Отверстия координированы относительно двух сборочных баз |
Т р1,4δL 1 1,4 δL 2 δL 1 = δL 2 = ± 0,7 Т р Т р = δL d δL d = ± Т р (размер задан до диагонали) Т доп = TD δL 1 = δL 2 = δL Т р 2,8 δL δL = ± 0,35Т р |
|
|
Отверстия расположены в несколько рядов (сборочная база отсутствует)
|
δL 1 = δL 2 = … δL Т р 2,8 δL δL = ± 0,35Т р Т р = δL d δL d = ± Т р (размер задан до диагонали) Т доп = TD |
|
|
Система полярных координат |
||
|
Два отверстия, координированы относительно оси центрального элемента
|
Т р = 2,8 δR δR = ± 0,35Т р δα
= ± (угловые минут ы) Т доп = TD |
|
|
Три и более отверстия расположены по окружности (сборочная база отсутствует)
Три и более отверстия расположены по окружности, центральный элемент является сборочной базой |
Т доп = TD Т р = 1,4 δα δα = ± 0,7Т р (угловые минут ы) δα 1 = δα 2 = Т доп = TD + Т D баз |
|
Таблица 3.16 – Диаметры сквозных отверстий под крепежные детали и соответствующие им гарантированные зазоры по ГОСТ 11284, мм
|
Диаметр крепежной детали d | ||||||
|
Примечания: 1 Предпочтительным является 1-й ряд, который используется для соединений типов А и В (отверстия могут быть получены любым методом). 2 Для соединений типов А и В рекомендуется использовать 2-й ряд при получении отверстий по разметке, пробивке штампом повышенной точности, в литье по выплавляемым моделям или под давлением. 3 Соединения типа А могут быть выполнены по 3-му ряду при расположении с 6-го по 10-и вид, а также соединения типа В при расположении с 1-го по 5-й вид (любой метод обработки, кроме заклепочных соединений). |
||||||





